Geolocation
The key element to achieve superiority in the “battlefield” is the “Information Superiority”.
In this view, the dominance of the Electromagnetic Spectrum represents a fundamental dimension for the acquisition of information and its dominance.
In fact, the elements of interest in the battlefield (deployed assets and threats) are mostly associated with wireless communications and Radar signals.
Therefore, the knowledge of this type of signals, their characterization and their recognition constitutes a strong and reliable way to acquire knowledge of the associated elements, therefore to build a clear and reliable picture of the situation (Picture Compilation), evaluate it (Situation Assessment), and possibly generate counteractions.
The ability to “geo-locate” an electromagnetic source is therefore increasingly essential and produces significant benefits:
-
allows to perform the “threat avoidance” function and therefore minimize the risks of “engagement” by a defence system during the execution of a mission;
-
contributes to the missile designation (targeting) with no use of active guidance systems, which could be intercepted and jammed;
-
allows the determination of the area of action of any associated weapons (missiles and point defences), essential for SEAD missions;
-
furthermore, increases the identification of platforms and weapons systems through correlations among co-located emitters.
A general geo-location system is composed by an array of m sensors.
The system can be ground-based or installed on a moving platform (aircraft, drone, etc.):
-
In case of ground-based system, sensors are deployed on the gaming area (typically they are part of a network and are connected to a Command & Control)
-
In case of a moving platform, the sensors are antennas – properly placed on the air platform – connected to receivers and processor.
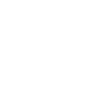
In the general case, each sensor receives the combination of n simultaneous signals:
being
sij (t): the signal emitted by the j-th source and received by the i-th antenna of the system
sEj (t): the signal emitted by the j-th source
dij (t): the distance between the j-th source and the i-th antenna of the system
c: the speed of light.
What is required is an estimation of the coordinates of the electromagnetic source, analysing the characteristics in angle-time-frequency of the received signal and/or its “history” during time.
Any a-priori information about the signal or the “imagined” position of the source can simplify the problem and increase the accuracy of the estimation, such as:
-
number of signals: unknown number of signals, known number of signals, only one signal
-
waveform: no information, description of the signal only in a stochastic sense, description of the signal in the time domain with superimposed stochastic fluctuations, description of the signal completely deterministic
-
coherence of the signal: not coherent, coherence from pulse to pulse
-
availability of initial information on the position of the source and on the carrier frequency.
A fundamental parameter is the accuracy of the measurement, which can only be determined after the definition of an appropriate estimation criterion.
It is possible to predict theoretically the best achievable accuracy in an estimation process, using the Cramer-Rao analysis, which provides the minimum obtainable variance in estimating a parameter for a given estimator.
The value obtained is indicated as the Cramer-Rao limit or lower bound (CRLB, Cramer-Rao Lower Bound).
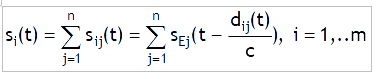
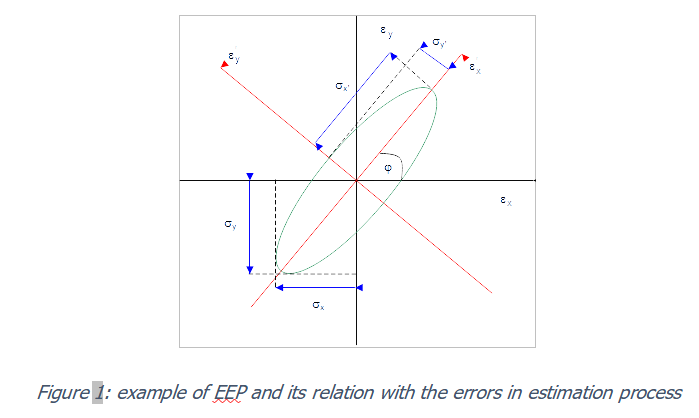
Following this method, the covariance matrix of the estimation error ![]() can be represented in a plane
can be represented in a plane ![]() as an ellipsoid locus of points satisfying the relation:
as an ellipsoid locus of points satisfying the relation:
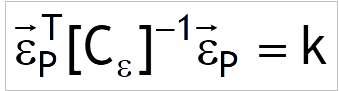
where ![]() in case of Gaussian-distributed errors.
in case of Gaussian-distributed errors.
The ellipsoid so defined is indicated as Elliptical Error Probable (EEP) whose shape, dimension and area are function of the parameter k, which is strictly related to the probability Pe that the estimated value is inside the EEP.
Sometimes, for reasons of simplicity, the accuracy is reported using a single parameter.
The most popular is CEP (Circular Error Probable), referred as the radius of the circle which include the true value of the estimation with a probability of 50%.
In describing each passive location techniques, a theoretical estimation (in closed form) of the measurement accuracy achievable using a Maximum Likelihood estimator will be provided, under the following assumptions:
-
Presence of a single emitter; this means that the separation in time or frequency of the single signals, in the case of the presence of more emitters, is supposed to be resolved using an appropriate De-interleaving Process.
Therefore n = 1 in the general relation; -
The source is identified before the start of the localization process, using an appropriate Identification Process.
This means that the shape of the signal is known a-priori and can be described in the time domain with superimposed stochastic fluctuations (e.g. due to propagation or to the reception system); -
The Time of Arrival of the signal (TOA) with respect to a referenced time scale and/or its Doppler shift is assumed to be/have been measured;
-
The position of the platform where the geolocation system is installed, as well as its attitude (elevation, azimuth and roll), are known unless negligible errors.
This assumption can be accepted if it is assumed the use of a GNSS (Global Navigation Satellite System) positioning system on board the platform, possibly integrated with a gyroscopic attitude control system; -
A highly stable frequency reference is available, such as a quartz oscillator (in case the geolocation system is installed in more than one platforms, it will also be necessary to have a common and highly stable time reference);
-
In the theoretical discussion, no degradation deriving from pre-processing will be taken into account, such as aliasing due to sampling or conversion errors.
Although the conditions mentioned above greatly simplify the theoretical analysis, in fact these are in line with most practical applications.
-
Passive geolocation techniques
When the geolocation is performed from airborne platform, three major types of techniques are identified:
-
Techniques based on measuring the angle of arrival (AOA) of the signal to be located, such as Mobile Triangulation technique
-
Techniques based on measuring the Time of Arrival (TOA) of the signal to be located, such as Mobile TDOA-based (Time Difference of Arrival) technique
-
Techniques based on the measurement of the Doppler frequency of the signal to be located, such as Mobile FDOA-based (Frequency Difference of Arrival) technique, which, differently than before, admits a relative motion between the source to be located and the receivers.
When geolocation is performed from ground-based (stationary) platforms, two major types of techniques are identified:
-
Techniques based on measuring the angle of arrival (AOA) of the signal to be located, such as Triangulation technique
-
Techniques based on measuring the Time of Arrival (TOA) of the signal to be located, such as TDOA-based (Time Difference of Arrival) technique (often referred as Multi-lateration technique).
In all those cases, it is assumed to perform a direct measurement of a certain entity (AOA, TOA, and Doppler) and to estimate the position of the source by suitably processing the measurement and its variations over time, with respect to a point and / or in different points in space at the same instant. Therefore, the whole process is composed by three phases:
-
the acquisition of the signal from the source, through one or more receivers that can be resident on the same platform or, in general, on several cooperating platforms;
-
the measurement of the quantity which will then allow the estimation of the position, starting from the processing carried out on the acquired signal;
-
the actual estimation of the position (coordinates).
The result and, therefore, the accuracy of the estimation and the time needed to obtain it are influenced by the receiving system, by the errors in the measurement of the quantity used for the estimate, by the estimation process itself.
In describing those techniques, we will try to highlight the following merit factors:
-
expected theoretical performance in terms of precision on the estimate,
-
required complexity of the receiver,
-
time needed for the estimation,
-
constraints on the behaviour of the platform,
-
any limitations of applicability for classes of signals.
For particular types of installations, it is possible to use several techniques simultaneously, both to obtain an improvement in the accuracy of the estimation and to guarantee the presence of information even in conditions of non-visibility in a certain measurement domain (e.g. the angle) with respect to another.




